一种骨科手术机器人末端执行装置
阅读说明:本技术 一种骨科手术机器人末端执行装置 (Orthopedic surgery robot tail end execution device ) 是由 胡熙臣 荣健 刘继坤 于 2021-09-30 设计创作,主要内容包括:本发明涉及一种骨科手术机器人末端执行装置,包含执行器壳体、轴向定位组件、卡环组件;所述执行器壳体内设有贯穿所述执行器的贯穿孔;所述轴向定位组件设置在所述贯穿孔内;所述轴向定位组件的周向设置有多个导向;所述轴向定位组件由夹紧环、夹紧滑块、导向套筒、滑块槽、第二滚珠轴承、第一弹簧、第三滚珠轴承构成。该装置具有结构简单,更换作业部件难度低,简化医生操作流程以及摩擦力小等优点。(The invention relates to an end executing device of an orthopedic surgery robot, which comprises an executor shell, an axial positioning assembly and a clamping ring assembly, wherein the executor shell is provided with a positioning hole; a through hole penetrating through the actuator is formed in the actuator shell; the axial positioning assembly is arranged in the through hole; a plurality of guides are arranged in the circumferential direction of the axial positioning assembly; the axial positioning assembly consists of a clamping ring, a clamping slide block, a guide sleeve, a slide block groove, a second ball bearing, a first spring and a third ball bearing. The device has the advantages of simple structure, low difficulty in replacing operation parts, simplified operation flow of doctors, small friction force and the like.)
技术领域
本发明涉及医疗器械技术领域,尤其涉及一种骨科手术机器人末端执行装置。
背景技术
随着人们对自身健康问题的关注度不断提高,在特定场景使用机器人技术辅助手术的需求日益升高。机器人有着操作方便,定位精度高,重复性好的特点。为了实现特定的工作,需要在机械臂末端安装相应的设备,该设备被称为末端执行器。
现有技术的末端执行器在锁紧后作业部件与锁紧机构之间存在摩擦,在高速作业的情况下执行机构会发热严重。同时锁紧机构由于长期磨损,导致机械性能衰减,如果不进行更换将会影响后续的锁紧定位效果;此外现有技术的锁紧机构多为球体,由于球面的特性,在施加较大的力的情况下锁紧球可能会从锁紧孔中脱出,导致锁紧失效。
发明内容
为解决背景技术中所述的问题,本发明提供一种骨科手术机器人末端执行装置,具有结构简单,更换作业部件难度低等优点。
本发明的技术方案为:一种骨科手术机器人末端执行装置,包含执行器壳体、轴向定位组件、卡环组件;所述执行器壳体内设有贯穿孔;所述轴向定位组件设置在所述贯穿孔内;所述轴向定位组件的周向设置有多个导向;所述轴向定位组件包括夹紧环、夹紧滑块、导向套筒、滑块槽、第二滚珠轴承、第一弹簧、第三滚珠轴承构成;所述滑块槽为外侧带有螺纹的圆环,其圆环的一侧为多个带有凹槽的圆形导向结构,用来限制夹紧滑块的位移;所述夹紧滑块为一侧带有坡度的扇形块,其内侧开有圆柱非贯通槽孔,用于与滑块槽的圆形导向结构配合;所述第一弹簧放置于夹紧滑块的非贯通槽孔中,与滑块槽的圆形导向凹槽配合,用于控制夹紧滑块在导向上的移动,提供夹紧滑块靠近导向套筒的趋势;所述导向套筒为两段直径不同的圆环组成的空心圆柱,其中粗段外侧设有挡圈,用来与第二滚珠轴承配合;内侧带有螺纹,用来与滑块槽外侧的螺纹配合;细段的内壁设有半圆形导向槽。
作为优选,所述执行器壳体包括套筒、第一滚珠轴承、第一轴承封盖、第二轴承封盖和封口法兰,所述第一轴承封盖和第二轴承封盖与套筒配合将第一滚珠轴承限制在执行器壳体内部;所述封口法兰为一侧带螺纹的空心圆柱,其螺纹与套筒尾部的螺纹配合将卡环组件固定在壳体内部。
作为优选,所述卡环组件由滑动套筒、卡环拉手、第二弹簧构成;所述卡环拉手为一段带有外螺纹的空心圆柱,其螺纹的另一端为复杂多边形外圈的圆环,所述外螺纹用来连接滑动套筒尾部的螺纹结构;所述第二弹簧与滑动套筒内壁以及封口挡圈内部配合,用来提供滑动套筒远离封口挡圈的趋势。
进一步地,所述套筒为尾部带螺纹的锥形空心圆柱,圆柱前段的截面直径小于后段的截面直径,后段下方开有与机器人末端连接的法兰座,套筒内壁设有多条半圆形导向槽。
进一步地,所述夹紧环为内侧锥孔的圆环,其外侧开有多条半圆形导向,用来与导向套筒内部的导向槽配合,限制其在径向方向的转动,其尾部为薄壁空心圆柱,用来安装第三滚珠轴承。
进一步地,所述滑动套筒为尾部带有螺纹的空心圆柱结构,其首端有多处向外突起的薄壁结构,用来与壳体内壁的导向槽配合,限制滑动套筒在壳体内的位移;首端内测有限位结构。
进一步地,所述第三滚珠轴承用来连接滑动套筒与夹紧环。
进一步地,所述卡环拉手为一段带有外螺纹的空心圆柱,其螺纹的另一端为复杂多边形外圈的圆环,所述外螺纹用来连接滑动套筒尾部的螺纹结构。
进一步地,所述第二弹簧与滑动套筒内壁以及封口挡圈内部配合,用来提供滑动套筒远离封口挡圈的趋势。
进一步地,所述卡环拉手与滑动套筒的连接处开凹槽,凹槽内放置防松垫片,提供卡环组件防松的效果。
本发明提供的末端执行装置的工作原理如下:当作业部件安装到执行器壳体内时,作业部件穿过轴向定位组件;当需要限制作业部件沿贯穿孔的轴向移动的时候,在卡环组件和轴向定位组件的配合下滑入套筒主体内,并插入作业部件的环形槽内,此时能够限制作业部件的轴向移动,且不影响作业部件的旋转,且固定时仅需要安装的时候推动卡环组件,使夹紧环施压与夹紧滑块,夹紧滑块压入定位孔内,就完成作业部件的固定,该末端执行器结构更加简单,降低更换作业部件的难度。
如需安装作业部件,首先向后拉动卡环拉手,并在行程末端旋转,使得滑动套筒卡入套筒内壁导向的限位槽。此时滑动套筒将不会被弹簧推回远端位。此时夹紧环被向后拖拽到避空位置,轴向定位组件的夹紧滑块失去夹紧环的压迫后在第一弹簧的作用下延径向向外运动,轴向定位组件完全避空。
随后延轴向装入作业部件直至作业部件上的限位部分与第一轴承封盖接触。此时反向旋转卡环拉手,失去限位后的滑动套筒在第二弹簧的作用下向远离法兰封盖的方向移动,带动夹紧环向前压迫夹紧滑块。夹紧滑块在锥形面的压迫下沿着导向向径向内侧移动,进入作业部件上的轴向限位环槽,完成锁紧工作。
本发明的优点:作业部件安装到执行器壳体内部时,作业部件穿过执行器壳体以及轴向定位组件;当需要限制作业部件沿贯穿孔的轴向移动时,在夹紧环的作用下,定位件滑入到轴向定位组件内,并插入作业部件的矩形环形槽内,此时能够限制作业部件的轴向移动,且不影响作业部件的旋转;使用多个轴承来隔绝随动旋转部件以及固定件,以减小摩擦;通过旋转限位槽来简便医生的操作流程;具有结构简单,更换作业部件难度低等优点。
附图说明
下面将参考附图来描述本发明示例性实施例的特征、优点和技术效果。
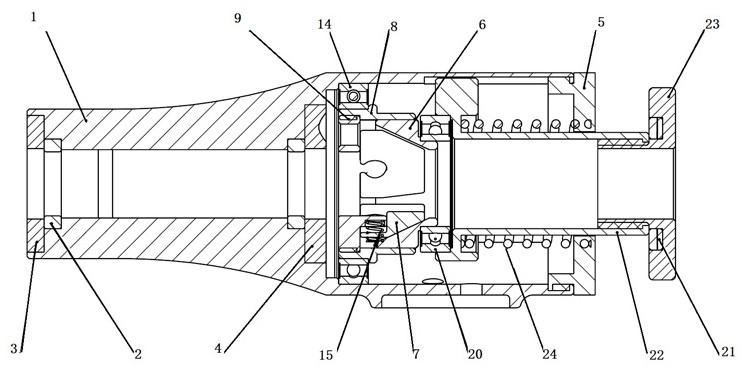
图1是本发明总装截面图;
图2是本发明执行器壳体的立体结构图;
图3是本发明执行器壳体的立体结构剖视图;
图4是本发明轴向定位组件的立体结构图;
图5是本发明轴向定位组件的截面剖视图;
图6是本发明卡环组件的立体结构图;
图7是本发明卡环组件的截面剖视图。
附图标记说明:1. 套筒;2. 第一滚珠轴承;3. 第一轴承封盖;4. 第二轴承封盖;5. 封口法兰; 6. 夹紧环; 7. 夹紧滑块; 8. 导向套筒; 9. 滑块槽;10.导向;14. 第二滚珠轴承;15. 第一弹簧; 20. 第三滚珠轴承;21. 防松垫片; 22. 滑动套筒 ;23. 卡环拉手; 24. 第二弹簧。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述和附图用于示例性地说明本发明的原理,但不能用来限制本发明的范围,即本发明不限于所描述的实施例。
在本发明的描述中,需要说明的是,除非另有说明,“多”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“装配”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可视具体情况理解上述术语在本发明中的具体含义。
为了更好地理解本发明,下面结合图1-7对本发明实施例进行详细描述。
如图1-7所示,本发明提供一种骨科手术机器人末端执行装置,包含执行器壳体、轴向定位组件、卡环组件;所述执行器壳体内设有贯穿所述执行器的贯穿孔;所述轴向定位组件设置在所述贯穿孔内;所述轴向定位组件的周向设置有多个导向10;所述轴向定位组件由夹紧环6、夹紧滑块7、导向套筒8、滑块槽9、第二滚珠轴承14、第一弹簧15、第三滚珠轴承20构成。
其中所述执行器壳体由套筒1、第一滚珠轴承2、第一轴承封盖3、第二轴承封盖4、封口法兰5构成;所述卡环组件由滑动套筒22、卡环拉手23、第二弹簧24构成。
其中导向套筒8为两段直径不同的圆环组成的空心圆柱,其中粗段外侧设有挡圈,用来与第二滚珠轴承14配合;内侧带有螺纹,用来与滑块槽9外侧的螺纹配合;细段的内壁设有半圆形导向槽。所述套筒1为尾部带螺纹的锥形空心圆柱,圆柱前段的截面直径小于后段的截面直径,后段下方开有与机器人末端连接的法兰座,套筒内壁设有多条半圆形导向槽。所述第一轴承封盖3和第二轴承封盖4与套筒1配合将第一滚珠轴承2限制在执行器壳体内部。所述封口法兰5为一侧带螺纹的空心圆柱,其螺纹与套筒尾部的螺纹配合将卡环组件固定在壳体内部。
另外所述滑块槽9为外侧带有螺纹的圆环,其圆环的一侧为多个带有凹槽的圆形导向结构,用来限制夹紧滑块的位移。所述夹紧滑块7为一侧带有坡度的扇形块,其内侧开有圆柱非贯通槽孔,用于与滑块槽的圆形导向结构配合。所述第一弹簧15放置于夹紧滑块的非贯通槽孔中,与滑块槽9的圆形导向凹槽配合,用于控制夹紧滑块在导向上的移动,提供夹紧滑块7靠近导向套筒8的趋势。所述导向套筒8为两段直径不同的圆环组成的空心圆柱,其中粗段外侧设有挡圈,用来与第二滚珠轴承14配合;内侧带有螺纹,用来与滑块槽9外侧的螺纹配合;细段的内壁设有半圆形导向槽。所述夹紧环6为内侧锥孔的圆环,其外侧开有多条半圆形的导向10,用来与导向套筒8内部的导向槽配合,限制其在径向方向的转动,其尾部为薄壁空心圆柱,用来安装第三滚珠轴承20。所述滑动套筒22为尾部带有螺纹的空心圆柱结构。其首端有多处向外突起的薄壁结构,用来与壳体内壁的导向槽配合,限制滑动套筒22在壳体内的位移;首段内测有限位结构。所述第三滚珠轴承20与滑动套筒22的限位结构配合,用来连接滑动套筒22与夹紧环6。所述卡环拉手23为一段带有外螺纹的空心圆柱,其螺纹的另一端为复杂多边形外圈的圆环,所述外螺纹用来连接滑动套筒22尾部的螺纹结构。所述第二弹簧24与滑动套筒22内壁以及封口挡圈内部配合,用来提供滑动套筒远离封口挡圈的趋势。所述卡环拉手23与滑动套筒22的连接处开凹槽,凹槽内放置防松垫片21,提供卡环组件防松的效果。
当作业部件安装执行器壳体内时,作业部件穿过轴向定位组件;当需要限制作业部件沿贯穿孔的轴向移动的时候,在卡环组件和轴向定位组件的配合下,定位件滑入套筒主体内,并插入作业部件的环形槽内,此时能够限制作业部件的轴向移动,且不影响作业部件的旋转,且固定时仅需要安装的时候推动卡环组件,使夹紧环施压与夹紧滑块,夹紧滑块压入定位孔内,就完成作业部件的固定,该末端执行器结构更加简单,降低更换作业部件的难度。
如需安装作业部件,首先向后拉动卡环拉手,并在行程末端旋转,使得滑动套筒卡入套筒内壁导向的限位槽。此时滑动套筒将不会被弹簧推回远端位。此时夹紧环被向后拖拽到避空位置,轴向定位组件的夹紧滑块失去夹紧环的压迫后在第一弹簧的作用下延径向向外运动,轴向定位组件完全避空。
随后延轴向装入作业部件直至作业部件上的限位部分与第一轴承封盖接触。此时反向旋转卡环拉手,失去限位后的滑动套筒在第二弹簧的作用下向远离法兰封盖的方向移动,带动夹紧环向前压迫夹紧滑块。夹紧滑块在锥形面的压迫下沿着导向向径向内侧移动,进入作业部件上的轴向限位环槽,完成锁紧工作。
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件,尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
- 上一篇:一种医用注射器针头装配设备
- 下一篇:一种套管适配器和手术机器人