医学的检查和/或治疗设备
阅读说明:本技术 医学的检查和/或治疗设备 (Medical examination and/or treatment device ) 是由 M.阿津杰 S.格罗斯 N.赫尔曼 于 2015-05-21 设计创作,主要内容包括:一种医学的检查和/或治疗设备(1,29),其包括具有可多轴移动的臂(3,31)的机器人(2,30);设置在该臂(3,31)上的C形臂(4);用于给C形臂(4)供电的电缆(5,32);器件,该器件用于在C形臂(4)移动时使电缆(5,32)跟随;其中所述器件设置在机器人(2,30)上或者设置在机器人(2,30)的部件上。(A medical examination and/or treatment device (1,29) comprising a robot (2,30) with a multi-axis movable arm (3, 31); a C-arm (4) arranged on the arm (3, 31); a cable (5,32) for supplying power to the C-arm (4); means for following the cable (5,32) when the C-arm (4) moves; wherein the device is arranged on the robot (2,30) or on a component of the robot (2, 30).)
本申请是申请日为2015年5月21日、申请号为201510261202.6和发明名称为“医学的检查和/或治疗设备”的原发明申请的分案申请。
技术领域
本发明涉及一种医学的检查和/或治疗设备,其包括具有可多轴移动的臂的机器人、设置在该臂上的C形臂、用于给C形臂供电的电缆和用于在C形臂移动时使电缆随动的器件。
背景技术
这种被称为“ARTIS Zeego”的设备由申请人制造。在此其涉及的是用于血管造影应用的机器人,其具有支承C形臂的可多轴移动的臂。连接在C形臂上的电缆包含数据线路、控制线路以及用于供电的线路。在这种传统的医疗设备中,机器人的臂具有多个穿口,电缆通过所述穿口引导。电缆在电缆存储器中终结,电缆存储器通常安置在天花板上。在机器人运动时,电缆的长度增大,因此电缆被从电缆存储器中拉出。当机器人的C臂接着又回移到初始位置中时,则电缆在弹性元件的作用下再次被拉进电缆存储器中。
因为这种医学的检查和/或治疗设备具有相对工业机器人更广的运动可能性,因此可能很难相应地使电缆随动。
发明内容
本发明所要解决的技术问题在于,提供一种医学的检查和/或治疗设备,其可以实现C臂更广的运动可能性。
为了解决所述技术问题,在前述形式的医学的检查和/或治疗设备中按照本发明规定,所述器件设置在机器人上或设置在机器人的部件上。
本发明的基础构思在于,在传统设备中设置在天花板上的电缆存储器通过一种器件替代,该器件设置在机器人上或设置在机器人的部件上。所述器件设计用于,在C形臂移动时使电缆随动或者提供电缆更长的所需长度。通过这种方式可以舍去电缆存储器,因为电缆所需要的附加长度可以直接在机器人上提供。由此产生的优点是,所述电缆在全部可考虑的运动中可以围绕多个轴线随动,而不会出现由安装在天花板上的电缆存储器或安装在天花板上电缆滚轴导致的限制。由此得出的优点是,电缆或其用于运动所需的附加长度可以被更快地移动,因此可多轴移动的机器人臂的运动速度也可以被提升。重要的是,电缆在运动中所需的附加长度的提供不再在安装在天花板上的电缆存储器中进行,而是直接地在机器人上、尤其在可多轴活动的臂上进行。
按照本发明的第一种结构设计规定,所述器件设计为具有一个或多个伸缩件的伸缩牵引器。在最简单的情况中,伸缩牵引器具有仅一个伸缩件,其可以线性移动,由此电缆在C形臂移动时随动。通过操作伸缩牵引器的伸缩件可以进行电缆所需的随动,这种随动在C臂运动时是必要的。为了进一步改善所述随动,按照本发明规定,伸缩牵引器具有多个伸缩件。其例如具有两个或三个可相互运动的伸缩件。在此一个伸缩件安置在机器人上或安置在机器人铰接安置的臂上,另一个伸缩件与电缆相连。
为了提高用户友好性,伸缩牵引器的至少一个伸缩件具有驱动器。借助这种驱动器可以驱动伸缩牵引器,由此可以自动地调节医学的检查和/或治疗设备。按照本发明一种扩展设计还显然可行的是,伸缩牵引器的所有伸缩件具有驱动器。特别优选的是在一种变型中,两个或多个伸缩件运动学地相互耦连,因此在操作其中一个伸缩件时另一个或另外几个伸缩件也同样被操作,也就是被移动。通过这种措施可以提高伸缩牵引器的运动速度并且因此提高电缆的运动速度。
在本发明的范畴中规定,驱动器设计为旋转电机或线性电机或具有牵引螺杆的电机单元、液压缸或气动缸。所有提及的驱动器能够移动伸缩牵引器。
按照本发明优选的是,伸缩牵引器具有平衡质量,所述平衡质量在伸缩牵引器运动时可以沿与该运动相反的方向运动。借助该平衡质量可以实现质量平衡,由此可以避免在电缆中的过高的力。尤其可以借助该平衡质量根据倾斜角对重力进行补偿。显然也可以为伸缩牵引器的多个伸缩件分别配备平衡质量。在此平衡质量始终沿相对伸缩牵引器或其伸缩件相反的方向移动,由此可以自动补偿由于伸缩件的伸进或伸出所引起的重量分布的改变。
在这种关系中特别优选的是,平衡质量通过牵引件与伸缩牵引器相连。所述牵引件可以设计为皮带或链条,因此在伸缩件运动时平衡质量也可以通过借助牵引件的运动学的耦连被移动。在反向运动时,例如在伸缩件被朝收起位置牵引时平衡质量同样沿相反的方向运动。
在按照本发明的医学的检查和/或治疗设备中,伸缩牵引器的多个伸缩件中的至少一个具有围绕的牵引件,所述牵引件在一侧与第一伸缩件并且在相反的侧面与第二伸缩件耦连。所述牵引件在此设计为连续的皮带,其在两个间隔的滚轮上运行。伸缩件可以位于上部回行段上,平衡质量可以位于下部回行段上。
本发明的另一种变型规定,为伸缩牵引器配备阻尼元件,用于阻尼伸缩件的运动。因此尤其应该阻尼不期望的振动或震动,这些震动或振动可能负面地影响成像设备。阻尼元件例如可以设计为粘性阻尼器。
在本发明的范畴中,伸缩伸缩件具有一个或多个减振的终端止挡。由此当伸缩件到达终端止挡时避免机械的撞击或震动。通过这种措施也可以避免在成像设备中的干扰。
在具有多个伸缩件的伸缩牵引器中优选同步地操作所有伸缩件。通过这种方式,可以在任何时间固定电缆的位置。
按照本发明备选的实施形式,所述器件设计为具有至少两个铰链区段的铰链。提供铰链,用以取代伸缩牵引器,铰链一侧与机器人、尤其与机器人的臂相连并且另一侧与电缆相连。至少两个铰链区段在运动平面中可以相互转动,因此它们自由端的间距实际上在零和两个铰链区段的总长度之间改变。因为电缆与该铰链的一端相连,则通过铰链的运动进行随动。在C形臂通过可多轴移动的臂运动而运动时(所述臂通常具有多个铰接的、可动的区段),则电缆通过具有至少两个铰链区段的铰链的相应的运动而随动。必要时,铰链也可以具有多于两个的铰链区段,例如三个或四个铰链区段,由此构成剪刀形铰链或折尺形铰链。通过选择具有与铰链区段适配的长度的铰链,然而也可以通过具有两个铰链部段的铰链进行电缆所需的随动。
也可以考虑的是,在医学的检查和/或治疗设备中,铰链具有至少一个用于产生回复力的弹性元件。在铰链朝打开位置运动之后,弹簧元件也可以将铰链或其铰链部段再次向初始位置回拉。在打开的状态中,铰链的止动是可行的。
为了提高用户友好性可以规定,铰链具有至少一个驱动器。与所述的伸缩伸缩件的驱动器相似地,该用于该铰链的驱动器可以设计为旋转电机或线性电机或具有牵引螺杆的电机单元、液压缸或气动缸。
在本发明的两种变型中,也就是在伸缩牵引器以及铰链中,电缆借助至少一个保持件设置在所述器件上。在一种情况中,该保持件安置在伸缩牵引器上,在另一种情况中保持件设置在铰链上。
医学的检查和/或治疗设备的电缆优选容纳在软管或套管中。因为软管或套管不接触设备的其他部件,因此实际上不产生磨损,这对于在无菌的治疗室内的应用是有利的。另一优点在于,容纳在软管或套管中的电缆在需要时便于清洁,由此满足了为在医疗领域中应用所存在的卫生要求。
附图说明
以下结合实施例参照附图阐述本发明的其他优点和细节。所述附图是示意图并且在附图中:
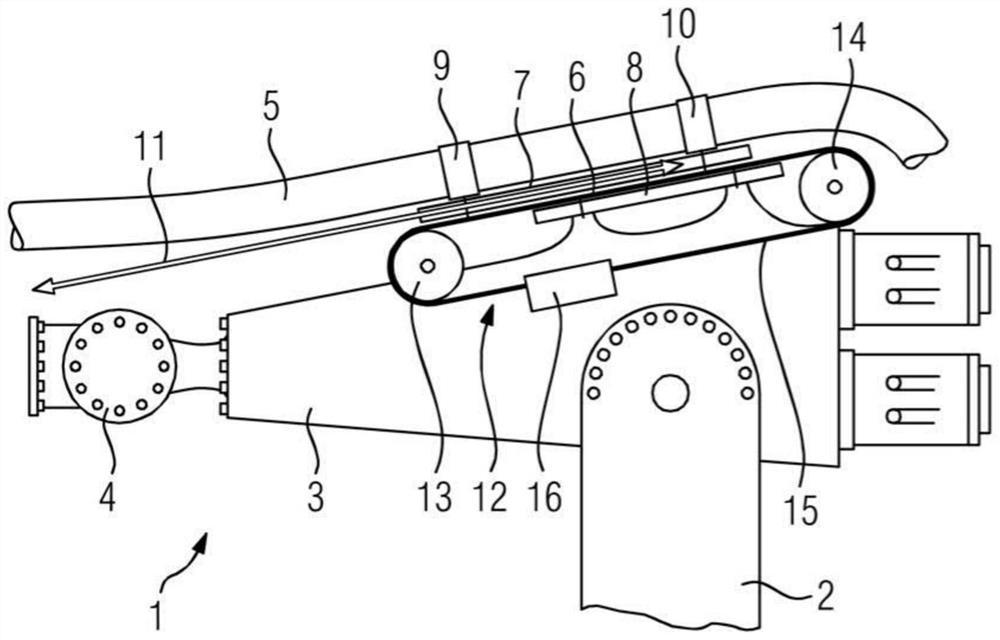
图1示出按照本发明的医学的检查和/或治疗设备的第一实施例的细节;
图2示出伸缩牵引器的示意图;
图3示出伸缩牵引器的另外的示意图;
图4至6示出具有伸缩牵引器的按照本发明的医学的检查和/或治疗设备的实施例;和
图7至12示出医学的检查和/或治疗设备的另外的实施例,其中电缆可以借助铰链随动。
具体实施方式
图1示出医学的检查和/或治疗设备1的细节,其具有仅部分示出的机器人2,在所述机器人上安装可多轴移动的臂3。可枢转运动的臂3在其自由端上支承C形臂4,所述C形臂是血管造影设备的组件。在图1中示出,医学的检查和/或治疗设备1具有电缆5,其中示出电缆的一个区段。电缆5一方面与C形臂4相连,另一方面与机器人2相连。在可多轴移动的C臂4运动时,电缆5必须相应地随动,而其中不产生明显的拉应力。在电缆5中包含电线束,其包括数据线路、控制线路和用于给C形臂4供电的供电线路。
伸缩牵引器6被用作在C臂运动时使电缆5随动的器件,伸缩牵引器6设置在机器人2上、更精确地说是设置在机器人2的臂3上。
在所示实施例中,伸缩牵引器6具有两个伸缩件7、8。伸缩件7通过保持件9、10固定地与电缆5相连。伸缩件8位置固定地设置在臂3上。但是也可以考虑变形的实施形式,其中伸缩件8相对臂3可滑移地设置。
伸缩牵引器6具有驱动器(未示出),通过所述驱动器伸缩件7可以相对伸缩件8滑移,伸缩件7的运动方向通过双箭头11表示。
此外伸缩牵引器6的构件是皮带传动器12,其包括两个相互间隔、可旋转地支承在臂3上的转向滚轮13、14,其通过皮带15相互耦连。连续的皮带15包围两个转向滚轮13、14,皮带15的上部回行段与伸缩件7固定相连。皮带15的下部回行段具有平衡质量16,因此在伸缩件7沿一个方向运动时,平衡质量16沿相反方向运动。平衡质量16实现了质量平衡,由此产生这样的优点,即用于移动伸缩件7的操作力不需要很高。
在C形臂4移动时,电缆5通过伸缩牵引器6的运动相应地随动,因此电缆5可以跟随C形臂4的各种运动。
图2示出具有伸缩牵引器21的医学的检查和/或治疗设备1的另一种实施例的细节。与前述实施例不同的是,机器人的臂3总共具有三个可移动的伸缩件17、18、19,其中在图2中在最下方位置示出的伸缩件17相对固定的导向件20可移动。伸缩件19与前述实施例同样地通过保持件9、10与电缆5相连。与前述实施例相对比,图2所示的伸缩牵引器21具有的优点是,在单独的伸缩件17、18、19的长度较小时也可实现相同的牵引路程。
图3示出伸缩牵引器21的伸缩件17、18、19,其中伸缩件18具有转向滚轮13、14,它们通过绳索22运动学地相互耦连。在图3中示出,伸缩件18通过其上部回行段与伸缩件19耦连并且通过其下部回行段与伸缩件17耦连。通过这种运动学的耦连,伸缩件17、19这样被控制,使得它们同步地相互运动。
图4示出伸缩牵引器23的另一种实施例,其具有第一皮带传动器24、第二皮带传动器25和第三皮带传动器26。图5示出在图4中所示的伸缩牵引器23的另外的立体图。用于电缆5的保持器9、10与第一皮带传动器24的部件相连。第一皮带传动器24与第二皮带传动器25相连,第二皮带传动器25又与第三皮带传动器26相连。这种三重的伸缩牵引器23被电动地驱动,由此在电缆5中的力尽可能地被减小。伸缩牵引器23可以被这样控制,使得仅唯一的皮带传动器被驱动,由此电缆5的运动按照1:3的比例被转换,由此路程增加成三倍。其中皮带传动器之一要么线性地被驱动,备选地伸缩牵引器23通过所示的(配备驱动器的)转向滚轮之一驱动。因为各个伸缩件通过皮带传动器运动学地相互耦连,因此在哪个位置进行驱动并不重要,因为伸缩牵引器23的全部部件都被强制地移动。
图6示出在图4和5中所示的伸缩牵引器23的细节,其中在伸缩件27上安置平衡质量28。平衡质量28可以借助伸缩件被移动,用于引起所需的质量补偿或回引力的降低。
图7至12示出医学的检查和/或治疗设备29的另一种实施例,其与前述实施例相同地具有带有可多轴移动的臂31的机器人30,在臂31上安置可围绕多轴移动的C形臂4。具有两个铰链区段34、35的铰链33用作用于使电缆32随动的器件。铰链33安置在机器人30的臂31上,通过铰链部段34与臂31相连并且铰链35与电缆32相连。在机器人30的臂31移动时和/或C臂4相对臂31移动时,电缆32可以借助铰链33相应地随动,因此在各个位置上都可以提供电缆32需要的长度。图7和8示出处于最终位置中的铰链33,其中两个铰链区段34、35几乎平行地定向。在该位置中,铰链区段35的面向C形臂4的端部离C形臂特别近。图9示出医学的检查和/或治疗设备29的另外的立体图。
图10示出设备29位于铰链33被收起的位置中,也就是两个铰链区段34、35围成一个锐角。相应地电缆32相对前述附图处于回拉的位置中,从所构成的弯圈36也可看出这一点。铰链33的运动或调节借助驱动电机进行,其设置在两个铰链区段34、35之间的连接位置上。
图11和12示出铰链33,其处于在图10所示的完全收起的位置和在图7至9所示的完全展开的位置之间的中间位置中。图11从相反侧面示出图12的细节视图。
在图11和12中示出,电缆32通过对被驱动的铰链33的相应的控制沿固定路径移动。根据铰链33的位置,电缆32朝向C形臂移动或远离C形臂移动。具有套管的电缆32可以便于清洗,因此其满足了在医疗领域中的卫生要求。
虽然本发明详细地通过优选的实施例详细的描述和说明,但是本发明不局限于所公开的实施例并且其他的变型可以由本领域技术人员由此推导出来,只要不脱离本发明的保护范围即可。
附图标记清单
1检查和/或治疗设备
2机器人
3臂
4C形臂
5电缆
6伸缩牵引器
7伸缩件
8伸缩件
9保持件
10保持件
11双箭头
12皮带传动器
13转向滚轮
14转向滚轮
15皮带
16平衡质量
17伸缩件
18伸缩件
19伸缩件
20导向件
21伸缩牵引器
22绳索
23伸缩牵引器
24皮带传动器
25皮带传动器
26皮带传动器
27伸缩件
28平衡质量
29检查和/或治疗设备
30机器人
31臂
32电缆
33铰链
34铰链区段
35铰链区段
36弯圈
- 上一篇:一种医用注射器针头装配设备
- 下一篇:一种排粪造影检查用的免冲水马桶