风力发电机组及其控制系统
阅读说明:本技术 风力发电机组及其控制系统 (Wind generating set and control system thereof ) 是由 刘嘉明 吴立建 方杭杭 王思奇 于 2021-08-05 设计创作,主要内容包括:本申请提供一种风力发电机组及其控制系统,风力发电机组控制系统包括:主控回路,包括转矩给定控制单元、加阻控制单元和第一合并单元,第一合并单元用于对目标转矩和阻尼转矩进行合并,获得第一转矩给定;变流器控制回路,包括转矩控制回路、主动识别单元和第二合并单元,主动识别单元施加激励信号给风力发电机组,使得风力发电机组产生谐振,并获取风力发电机组的谐振状态,根据谐振状态确定谐振转矩偏移量,第二合并单元用于对第一转矩给定和谐振转矩偏移量进行合并,获得第二转矩给定,转矩控制回路用于根据第二转矩给定,对发电机进行控制。本申请通过在变流器控制回路中设置主动识别单元,实现阻尼转矩的自动调节。(The application provides a wind generating set and control system thereof, wind generating set control system includes: the main control loop comprises a torque given control unit, a resistance adding control unit and a first merging unit, wherein the first merging unit is used for merging the target torque and the damping torque to obtain a first torque given value; the converter control loop comprises a torque control loop, an active identification unit and a second merging unit, wherein the active identification unit applies an excitation signal to the wind generating set to enable the wind generating set to generate resonance, obtains a resonance state of the wind generating set, determines a resonance torque offset according to the resonance state, the second merging unit is used for merging the first torque given value and the resonance torque offset to obtain a second torque given value, and the torque control loop is used for controlling the generator according to the second torque given value. According to the damping torque automatic regulation method and device, the active recognition unit is arranged in the converter control loop, and the damping torque automatic regulation is achieved.)
技术领域
本申请涉及风力发电机组领域,尤其涉及一种风力发电机组及其控制系统。
背景技术
常见的主动式传动链与塔架的加阻控制由风力发电机组的主控回路实现,如图1所示,风力发电机组的速度观测器或者加速度传感器提取到发电机产生的转速波动分量ωg(rpm),并将该转速波动分量作为加阻控制单元的输入,加阻控制单元输出的阻尼转矩加入到主控回路发给变流器的转矩给定中,经过变流器控制输出相应的阻尼控制转矩T,从而控制发电机的转矩。
目前,人为手动基于先验知识或者现场经验来调整阻尼转矩,且最终调整的阻尼转矩无法达到最佳效果并不能保证风力发电机组的稳定性。
发明内容
本申请提供一种风力发电机组及其控制系统。
具体地,本申请是通过如下技术方案实现的:
本申请实施例的第一方面,提供一种风力发电机组控制系统,其中,风力发电机组包括发电机和变流器;所述风力发电机组控制系统包括:
主控回路,包括转矩给定控制单元、加阻控制单元和第一合并单元,所述转矩给定控制单元用于根据所述发电机的转速,确定所述发电机的目标转矩,所述加阻控制单元用于根据所述变流器的速度观测器观测获得的所述发电机的转速或者外部的加速度传感器检测获得的所述发电机的振动信息,确定阻尼转矩,所述第一合并单元用于对所述目标转矩和所述阻尼转矩进行合并,获得第一转矩给定;
变流器控制回路,包括转矩控制回路、主动识别单元和第二合并单元,所述主动识别单元施加激励信号给所述风力发电机组,使得所述风力发电机组产生谐振,并获取所述风力发电机组的谐振状态,根据所述谐振状态确定谐振转矩偏移量,所述第二合并单元用于对所述第一转矩给定和所述谐振转矩偏移量进行合并,获得第二转矩给定,所述转矩控制回路用于根据所述第二转矩给定,对所述发电机进行控制。
可选地,所述主动识别单元包括激励信号发生器,所述激励信号发生器用于根据至少一种激励产生所述激励信号,所述激励包括白噪音和正弦波发生器产生的正弦波信号中的至少一种。
可选地,所述激励包括白噪音,所述激励信号包括第一激励信号;
所述激励信号发生器包括低通滤波器、高通滤波器以及第一增益控制器,所述白噪音依次经所述低通滤波器、所述高通滤波器以及所述第一增益控制器后获得的第一激励信号。
可选地,所述激励包括正弦波发生器产生的正弦波信号,所述激励信号包括第二激励信号;
所述激励信号发生器包括第二增益控制器,所述正弦波信号经所述第二增益控制器后获得的第二激励信号。
可选地,所述激励包括白噪音和正弦波发生器产生的正弦波信号,所述激励信号包括第一激励信号和第二激励信号;
所述激励信号发生器包括第三合并单元,所述第三合并单元用于将第一激励信号和第二激励信号合并后输出,所述第一激励信号为所述白噪音产生,所述第二激励信号为所述正弦波信号产生。
可选地,所述激励还包括所述变流器的速度观测器观测获得的所述发电机的转速或者外部的加速度传感器检测获得的所述发电机的振动信息,所述激励信号还包括第三激励信号;
所述激励信号发生器还包括带通滤波器、超前滞后滤波器以及第三增益控制器,所述变流器的速度观测器观测获得的所述发电机的转速或者外部的加速度传感器检测获得的所述发电机的振动信息依次经所述带通滤波器、超前滞后滤波器以及第三增益控制器后获得第三激励信号,所述第三合并单元用于将第一激励信号、第二激励信号和第三激励信号合并后输出。
可选地,所述激励信号发生器还包括饱和器,用于将所述第三合并单元输出的激励信号大小限制在预设激励信号范围内并输出。
可选地,所述主动识别单元根据所述谐振状态确定谐振频率、对应的相位和增益,并根据所述谐振频率、对应的相位和增益,确定谐振转矩偏移量。
本申请实施例的第二方面,提供一种风力发电机组,包括发电机、变流器和第一方面任一项所述的风力发电机组控制系统。
根据本申请实施例提供的技术方案,通过在变流器控制回路中设置主动识别单元,实现阻尼转矩的自动调节,能使调节出的阻尼转矩更为准确,避免了人工调节的繁琐和不十分准确。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
图1是常规的风力发电机组控制系统的结构示意图;
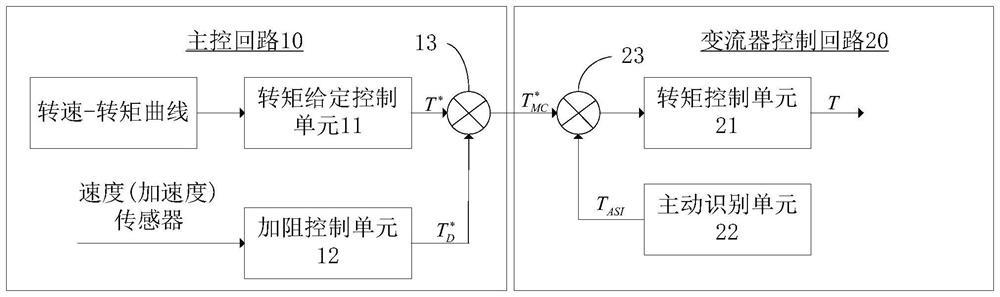
图2是本申请一示例性实施例示出的一种风力发电机组控制系统的结构示意图;
图3是本申请一示例性实施例示出的一种激励信号发生器的结构示意图。
附图标记:
10、主控回路;11、转矩给定控制单元;12、加阻控制单元;13、第一合并单元;20、变流器控制回路;21、转矩控制回路;22、主动识别单元;221、低通滤波器;222、高通滤波器;223、第一增益控制器;224、第二增益控制器;225、第三合并单元;226、带通滤波器;227、超前滞后滤波器;228、第三增益控制器;229、饱和器;23、第二合并单元。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本申请相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本申请的一些方面相一致的装置和方法的例子。
在本申请使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。在本申请和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
应当理解,尽管在本申请可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本申请范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语“如果”可以被解释成为“在……时”或“当……时”或“响应于确定”。
下面结合附图,对本申请的风力发电机组及其控制系统进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
本申请实施例的风力发电机组可包括发电机和变流器。
参见图2,本申请实施例提供一种风力发电机组控制系统,该风力发电机组控制系统可包括主控回路10和变流器控制回路20。其中,主控回路10可包括转矩给定控制单元11、加阻控制单元12和第一合并单元13,转矩给定控制单元11用于根据发电机的转速,确定发电机的目标转矩T*,加阻控制单元12用于根据变流器的速度观测器观测获得的发电机的转速或者外部的加速度传感器检测获得的发电机的振动信息,确定阻尼转矩第一合并单元13用于对目标转矩T*和阻尼转矩进行合并,获得第一转矩给定
变流器控制回路20可包括转矩控制回路21、主动识别单元22和第二合并单元23,其中,主动识别单元22用于施加激励信号给风力发电机组,使得风力发电机组产生谐振。并且,主动识别单元22还用于获取风力发电机组的谐振状态,并根据谐振状态确定谐振转矩偏移量TASI。第二合并单元23用于对第一转矩给定和谐振转矩偏移量TASI进行合并,获得第二转矩给定T,转矩控制回路21用于根据第二转矩给定T,对发电机进行控制,从而使得变流器的速度观测器观测获得的发电机的转速的大小趋近于第二转矩给定T对应的转速。
本申请实施例通过在变流器控制回路20中设置主动识别单元22,实现阻尼转矩的自动调节,能使调节出的阻尼转矩更为准确,避免了人工调节的繁琐和不十分准确。
主动识别单元22可包括激励信号发生器,为了提高灵活性,激励信号发生器用于根据至少一种激励产生激励信号,本申请实施例的激励可包括白噪音和正弦波发生器产生的正弦波信号中的至少一种,但不限于此,激励还可包括其他类型的激励。
示例性地,在一些实施例中,激励包括白噪音,激励信号包括第一激励信号。白噪音产生的信号是随机的,将白噪音作为激励源能够更贴近于现实。本实施例中,激励信号发生器包括低通滤波器221、高通滤波器222以及第一增益控制器223,白噪音依次经低通滤波器221、高通滤波器222以及第一增益控制器223后获得的第一激励信号。滤波后的白噪音作为激励源的激励所存在,以更贴近于现实。
在一些实施例中,激励包括正弦波发生器产生的正弦波信号,激励信号包括第二激励信号。其中,正弦信号发生器产生的正弦波信号可以为频率和偏移可以被指定和在线调整为一个零均值的正弦曲线。本实施例中,激励信号发生器可包括第二增益控制器224,正弦波信号经第二增益控制器224后获得的第二激励信号。
如图3所示,激励包括白噪音和正弦波发生器产生的正弦波信号,激励信号包括第一激励信号和第二激励信号,实现不同激励的组合。进一步地,激励信号发生器包括第三合并单元225,第三合并单元225用于将第一激励信号和第二激励信号合并后输出,即第三合并单元225将第一激励信号和第二激励信号相加后输出。
再次参见图3,激励还可包括变流器的速度观测器观测获得的发电机的转速或者外部的加速度传感器检测获得的发电机的振动信息,激励信号还包括第三激励信号。本实施例中,激励信号发生器还可包括带通滤波器226、超前滞后滤波器227以及第三增益控制器228,变流器的速度观测器观测获得的发电机的转速或者外部的加速度传感器检测获得的发电机的振动信息依次经带通滤波器226、超前滞后滤波器227以及第三增益控制器228后获得第三激励信号,第三合并单元225用于将第一激励信号、第二激励信号和第三激励信号合并后输出,即第三合并单元225将第一激励信号、第二激励信号和第三激励信号相加后输出。
在一些实施例中,激励信号即为第三合并单元225的输出。
在另外一些实施例中,需对第三合并单元225的输出进一步处理,获得激励信号。例如,参见图3,激励信号发生器还可包括饱和器229,用于将第三合并单元225输出的激励信号大小限制在预设激励信号范围内并输出。举例而言,当第三合并单元225的输出大小在预设激励信号范围内,则第三合并单元225的输出即为激励信号;当第三合并单元225的输出大小不在预设激励信号范围内时,激励信号的大小为预设激励信号范围的最大值和最小值中最靠近第三合并单元225的输出大小的一个值。比如,当第三合并单元225的输出大小大于最大值,则饱和器229用于将第三合并单元225的输出的大小设置为最大值;当第三合并单元225的输出大小小于最小值,则饱和器229用于将第三合并单元225的输出的大小设置为最小值。可以理解地是,饱和器229也可采用其他策略将第三合并单元225的输出大小限制在预设激励信号范围内。
主动识别单元22根据谐振状态确定谐振频率、对应的相位和增益,并根据谐振频率、对应的相位和增益,确定谐振转矩偏移量。其中,主动识别单元22在根据谐振频率、对应的相位和增益,确定谐振转矩偏移量时,可采用现有算法。
本申请实施例的通过主动识别单元22主动注入谐振转矩偏移TASI,通过风力发电机组的传动链和塔架的谐振状态,识别出风力发电机组的谐振频率、对应的相位和增益,为主动阻尼控制提供直接的测试数据。主动识别单元22能够识别的谐振频率范围约为0.1Hz至10Hz,涵盖绝大部分的塔架与传动链的机械动力学频率范围。
本申请实施例中,主控回路10可通过风力发电机组的主控器实现,变流器控制回路20可通过变流器的控制器实现。
本申请实施例还提供一种风力发电机组,该风力发电机组可包括发电机、变流器和上述实施例中的风力发电机组控制系统。
以上所述仅为本申请的较佳实施例而已,并不用以限制本申请,凡在本申请的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本申请保护的范围之内。
- 上一篇:一种医用注射器针头装配设备
- 下一篇:一种多相电机故障的空间矢量脉宽调制方法