首页
最新技术
特色专题
技术名词
热点聚焦
行业风向
登录
注册
手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手
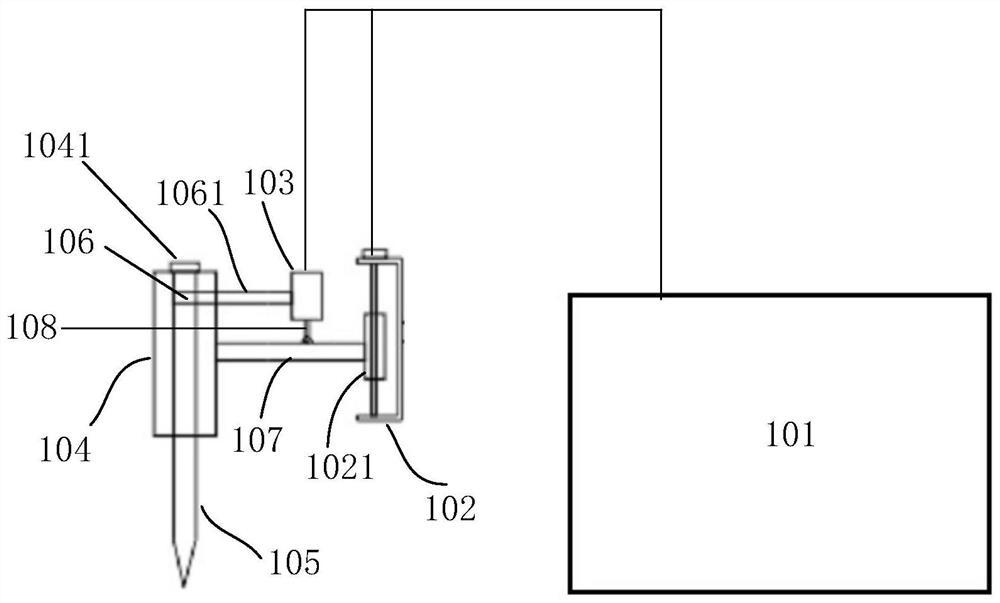
口腔手术辅助装置及口腔手术机器人
本申请提供口腔手术辅助装置及口腔手术机器人,其中口腔手术辅助装置包括:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;控制系统分别与第一驱动装置、第二驱动电连接,第一驱动装置上的滑动结构通过连接件与钻针壳体固定连接;钻针可拆卸的插装在钻针壳体内;第二驱动装置安装在连接件和/或滑动结构上,第二驱动装置通过传动结构驱动钻针壳体内的钻针转动。本申请提供的口腔手术辅助装置结构简单,使用方便,有效的降低了设备成本,易于行业推广使用。
2021-11-05
访问量:44
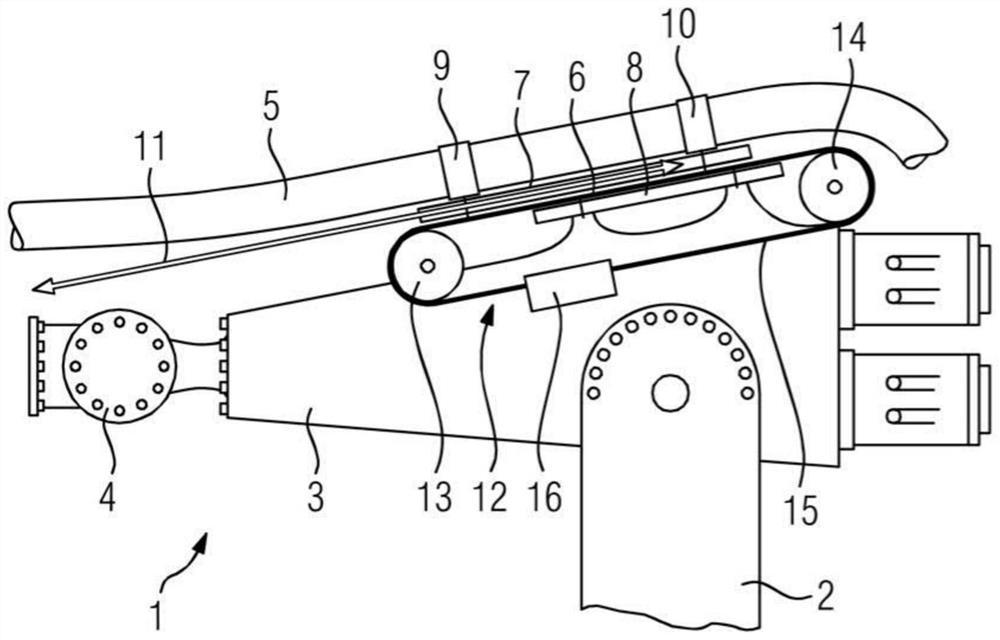
医学的检查和/或治疗设备
一种医学的检查和/或治疗设备(1,29),其包括具有可多轴移动的臂(3,31)的机器人(2,30);设置在该臂(3,31)上的C形臂(4);用于给C形臂(4)供电的电缆(5,32);器件,该器件用于在C形臂(4)移动时使电缆(5,32)跟随;其中所述器件设置在机器人(2,30)上或者设置在机器人(2,30)的部件上。
2021-11-05
访问量:60
远程操作系统
本发明提供一种系统,从使一位操作员掌握另一位操作员对作业机械的远程操作状态的观点来看,能够对该一位操作员提供适当的信息。在第1远程操作装置(10)中,由被动状态检测器(112)检测第1操作机构(111)的被动状态,并发送与该被动状态对应的操作状态数据。在第2远程操作装置(20)中,根据与操作状态数据对应的第1操作机构(111)的被动状态来控制致动器(212)的动作,由此使第2操作机构(211)主动地进行动作。
2021-11-02
访问量:38
平行连杆机构和连杆致动装置
该平行连杆机构设有基端连杆毂(1)、三个连杆机构(11)、旋转体(2a)和远端连杆毂(3)。旋转体(2a)与三个连杆机构(11)之一连接。旋转体(2a)与基端连接毂(1)可转动地联接。在连杆机构(11)中,第一旋转接头部件(25a-25c)的第一中心轴线(15a-15c)和第二旋转接头部件的第二中心轴线(16a-16c)相交于球面连杆中心点(30)处。旋转体(2a)的旋转轴线12与球面连杆中心点(30)相交。
2021-11-02
访问量:38
用于对设置在一次性隔离器中的容器进行灌装的灌装设备
本发明涉及一种灌装设备,用于将储备容器(7)中的流体灌装物(10)灌装到一次性隔离器(1)中的灌装物剂量容纳容器(5)中。设有称重装置(21)以及可控制的灌装物提取装置(17),称重装置具有用于将储备容器(7)与内含物固持在一次性隔离器(1)之外并称重的机构(23),灌装物提取装置用于在隔离器之外以剂量范围从储备容器提取灌装物。灌装物发放装置(13)处于隔离器(1)之外并且经由管道装置(11)与储备容器(7)连接。控制装置(19)根据称重装置(21)的信息控制灌装物提取装置(17),使得控制装置监控灌装物储备容器(7)的重量下降并分别与目标剂量重量比较,以控制灌装过程。
2021-11-02
访问量:43
具有线路引导装置的机器人臂
本发明涉及一种机器人臂(3),具有:能量线束(17),该能量线束具有中间线束段(17.3),中间线束段在线路引导装置(20)中被引导,线路引导装置包括电缆盘(21),电缆盘(21)具有至少在其部分周向上延伸的引导槽(22),当电缆盘(21)转动时,能量线束(17)的第一线束段(17.1)在该引导槽中被引导以至少部分地卷起和展开,并且电缆盘(21)具有中央的出口开口(23),能量线束(17)的第二线束段(17.2)从该出口开口被轴向地引出,其中电缆盘(21)被紧固在第二结构件上,并且中间线束段(17.3)在电缆盘的至少一个将引导槽(22)与出口开口(23)连接的至少一个连接通道(24)中被引导。
2021-11-02
访问量:21
可以减少由于网络的时间差引起的误操作的机器人与控制系统
机器人被配置为根据操作者经由网络做出的操作指示而运动。该机器人包括运动图像采集单元,接收单元,运动目的地预测单元和自主控制单元。运动图像采集单元被配置为捕获机器人周围的环境作为运动图像。接收单元被配置为接收操作指示。运动目的地预测单元被配置为基于由接收单元接收的操作指示来预测机器人的运动目的地。自主控制单元被配置为基于在接收到操作指示的时刻从运动图像获得的环境的信息,自主地校正根据操作指示到运动目的地的运动。
2021-11-02
访问量:30
用于确定机器人坐标系与可移动装置坐标系之间的关系的方法和控制装置
一种用于确定机器人(10)的机器人坐标系(R)与可移动装置(20)的MA坐标系(MA)之间的关系的方法和控制装置,可移动装置(20)包括传感器设备(22)和定位机构(26),定位机构(26)被配置为在MA坐标系(MA)中定位传感器设备(22)的传感器坐标系(C),其中标记(16)被布置成与机器人(10)上的参考位置(14)成固定关系。方法包括:相对于机器人坐标系(R)在多个不同姿态中定位(S10)标记(16)。针对多个不同姿态中的每个姿态,方法包括:在传感器信息的基础上,确定(S12)传感器坐标系(C)与标记坐标系(M)之间的关系确定(S13)MA坐标系(MA)与传感器坐标系(C)之间的关系确定(S14)机器人坐标系(R)与参考位置坐标系(E)之间的关系该方法还包括在多个不同姿态中,使用关系关系以及关系确定(S20)关系
2021-11-02
访问量:25
移动体的操纵装置及操纵系统
操纵装置(51)(主动装置)具备:上身支承部(65),其佩戴于操纵者(P)的上身,以能够伴随操纵者(P)移动而与操纵者(P)一起移动;以及移动指令决定部(94),其根据操纵者(P)的移动环境中的包含上身支承部(65)的移动速度的运动状态的观测值来决定移动体(1)(从动装置)的移动控制用指令值。通过操纵装置(51)的移动机构(52)及升降机构(60)的动作控制从而能够控制上身支承部(65)从操纵者(P)接受的反作用力。
2021-11-02
访问量:26
折叠式弓锯
提供一种可收缩或折叠的锯作为紧凑型手工工具,其在折叠时覆盖和保护刀片。折叠锯在延伸可用状态与折叠状态之间是可移动的。锯包括框架,该框架具有纵向可伸缩的上部构件,以及从上部构件悬垂的第一可收缩侧支撑件和第二可收缩侧支撑件。刀片联接在第一可收缩侧支撑件和第二可收缩侧支撑件之间,由此提供张紧机构以张紧刀片。此外,提供一种具有可枢转地联接到框架的第一部分的手柄,其中,手柄在第一状态与第二手柄状态之间枢转,在第一手柄状态下,形成自由端手柄,在第二手柄状态下,手柄接合上部构件并包封刀片。
2021-11-02
访问量:22
«
1
2
3
4
5
6
7
8
...
222
223
»
热门专题
左旋肉碱的制备方法 左旋肉碱生产工艺 左旋肉碱相关技术资料
免烧砖的制造方法及应用 免烧砖相关专利技术
水溶肥制备方法和应用 水溶肥相关技术资料
保温砂浆及其制备方法 保温砂浆相关技术资料
聚羧酸减水剂的配方 聚羧酸减水剂制备方法 聚羧酸减水剂相关技术资料
除湿机的结构设计 新型工业除湿机的制造 除湿机相关技术资料
脱硫剂的制备方法及系统 脱硫剂数字化评价装置及其评价方法
硅基材料的生产工艺 新型硅基负极材料 硅基材料相关生产制备工艺
柔性电池的制备方法 柔性电池的工艺原理 柔性电池相关生产制备技术资料
汽车充电桩的设计原理 新型汽车充电桩 汽车充电桩的生产制造设计工艺
技术分类
机械手;装有操纵装置的容器
车间设备,例如用于工件划线;车间储存设备
手动器械的手柄
不包括在其他类目中的组合工具或多用途工具;与执行操作无特殊关联并且不包括在其他类目中的轻便机动工具的零件或部件
冲击工具
手持钉钉或钉U形钉工具;手动轻便式钉U形钉工具
不包含在其他类目中的用于紧固、连接、拆卸或夹持的工具或台式设备
拨打电话
下载资料
栏目导航
会员登录