口腔手术辅助装置及口腔手术机器人
阅读说明:本技术 口腔手术辅助装置及口腔手术机器人 (Oral surgery auxiliary device and oral surgery robot ) 是由 田庆 聂智 谢永召 宋志伟 于 2021-08-27 设计创作,主要内容包括:本申请提供口腔手术辅助装置及口腔手术机器人,其中口腔手术辅助装置包括:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;控制系统分别与第一驱动装置、第二驱动电连接,第一驱动装置上的滑动结构通过连接件与钻针壳体固定连接;钻针可拆卸的插装在钻针壳体内;第二驱动装置安装在连接件和/或滑动结构上,第二驱动装置通过传动结构驱动钻针壳体内的钻针转动。本申请提供的口腔手术辅助装置结构简单,使用方便,有效的降低了设备成本,易于行业推广使用。(The application provides oral surgery auxiliary device and oral surgery robot, wherein oral surgery auxiliary device includes: the device comprises a control system, a first driving device, a second driving device, a drill point shell and a transmission structure; the control system is respectively electrically connected with the first driving device and the second driving device, and a sliding structure on the first driving device is fixedly connected with the drill point shell through a connecting piece; the drill point is detachably inserted in the drill point shell; the second driving device is arranged on the connecting piece and/or the sliding structure and drives the drill point in the drill point shell to rotate through the transmission structure. The application provides an oral operation auxiliary device simple structure, convenient to use, the effectual equipment cost that has reduced easily trade is used widely.)
技术领域
本申请实施例涉及高端装备医疗器械技术领域,尤其涉及一种口腔手术辅助装置及口腔手术机器人。
背景技术
当今社会针对口腔(如种牙、补牙)进行手术治疗的服务需求越来越多,目前口腔治疗行业内使用的口腔手术机器人多通过设置控制单元发布操控指令驱动机械臂移动,并通过机械臂带动连接在机械臂末端的手术设备如种植手机到相应手术位置,再通过操控该手术设备,如种植手机上控制连接的手术工具(如钻针)进行相应的口腔手术,才能保证口腔手术的治疗效果,这种传统的口腔手术机器人结构复杂,对操控者专业技术要求高,使用不便,成本高,不便于推广使用,维护困难。
发明内容
有鉴于此,本申请解决的技术问题之一在于提供一种口腔手术辅助装置及口腔手术机器人,其结构简单,使用方便且易于维护,能够大大降低设备的制造成本,易于推广使用。
第一方面,本申请提供一种口腔手术辅助装置,包括:口腔手术辅助装置:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;
所述控制系统分别与所述第一驱动装置、所述第二驱动装置电连接,所述第一驱动装置上的滑动结构通过连接件与所述钻针壳体固定连接,钻针可拆卸的插装在所述钻针壳体内;
所述第二驱动装置安装在所述连接件和/或滑动结构上,所述第二驱动装置通过所述传动结构驱动所述钻针壳体内的钻针转动。
可选地,在本申请的一种实施例中,所述钻针被所述第二驱动装置驱动工作时的移动轨迹与所述滑动结构的移动轨迹平行。
可选地,在本申请的一种实施例中,所述连接件与所述钻针壳体垂直连接。
可选地,在本申请的一种实施例中,所述连接件为直杆或弧形杆。
可选地,在本申请的一种实施例中,所述第二驱动装置通过固定杆可拆卸地安装在所述连接件上。
可选地,在本申请的一种实施例中,所述传动结构包括传动轴和齿轮组;
所述第二驱动装置的驱动轴与所述传动轴连接,所述传动轴与所述齿轮组连接,所述齿轮组与所述钻针连接。
可选地,在本申请的一种实施例中,所述钻针壳体顶部设有用于拆装所述钻针的锁紧开关。
可选地,在本申请的一种实施例中,所述第一驱动装置包括第一驱动电机和丝杆;
所述滑动结构安装在所述丝杆上,所述丝杆与所述第一驱动电机连接,所述第一驱动电机驱动所述丝杆转动。
可选地,在本申请的一种实施例中,所述第一驱动装置还包括基座,所述滑动结构设置在所述基座上。
可选地,在本申请的一种实施例中,所述滑动结构还包括:滑块、直线导轨、支撑座;
所述滑块与所述连接件连接,所述支撑座固定设置在所述基座上,所述直线导轨与所述支撑座固定连接,所述直线导轨贯穿所述滑块,所述滑块内设有螺纹,所述丝杆旋拧入所述螺纹中,通过所述第一驱动电机驱动所述丝杆转动,从而带动滑块移动。
可选地,在本申请的一种实施例中,所述支撑座包括前支撑座和后支撑座,其中:
所述前支撑座固定设置于所述基座上靠近所述第一驱动电机的位置;
所述后支撑座固定设置于所述基座上远离所述第一驱动电机的位置;
所述直线导轨安装在所述前支撑座和所述后支撑座之间且与所述前支撑座、所述后支撑座垂直。
第二方面,本申请实施例还提供一种口腔手术机器人,包括本申请第一方面所述的任意一种口腔手术辅助装置,还包括:机械臂;
所述第一驱动装置固定安装在所述机械臂的末端,所述机械臂与所述控制系统电连接。
可选地,在本申请的一种实施例中,所述口腔手术机器人还包括:操控组件;
所述操控组件与所述控制系统电连接,所述操控组件用于生成对所述机械臂和/或所述口腔手术辅助装置的控制指令。
可选地,在本申请的一种实施例中,所述口腔手术机器人还包括箱体;
所述控制系统设置在所述箱体内;
所述机械臂的前端与箱体的顶部固定连接;
所述操控组件可拆卸的安装在所述箱体的侧壁上。
本申请提供的技术方案中,口腔手术辅助装置包括:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;所述控制系统分别与所述第一驱动装置、所述第二驱动电连接,所述第一驱动装置上的滑动结构通过连接件与所述钻针壳体固定连接;所述钻针插装在所述钻针壳体内;所述第二驱动装置通过所述传动结构驱动所述钻针壳体内的钻针转动,所述第二驱动装置安装在所述连接件和/或滑动结构上。本申请实施例提供的口腔手术辅助装置,通过控制系统控制第一驱动装置上的滑动结构带动插装在钻针壳体内的钻针朝准口腔手术靶位,当控制系统控制第二驱动装置工作时,第二驱动装置通过传动结构驱动钻针转动,以在患者的口腔手术靶位完成钻孔等手术,结构简单,使用方便,大大降低了设备的成本,易于行业推广使用。
附图说明
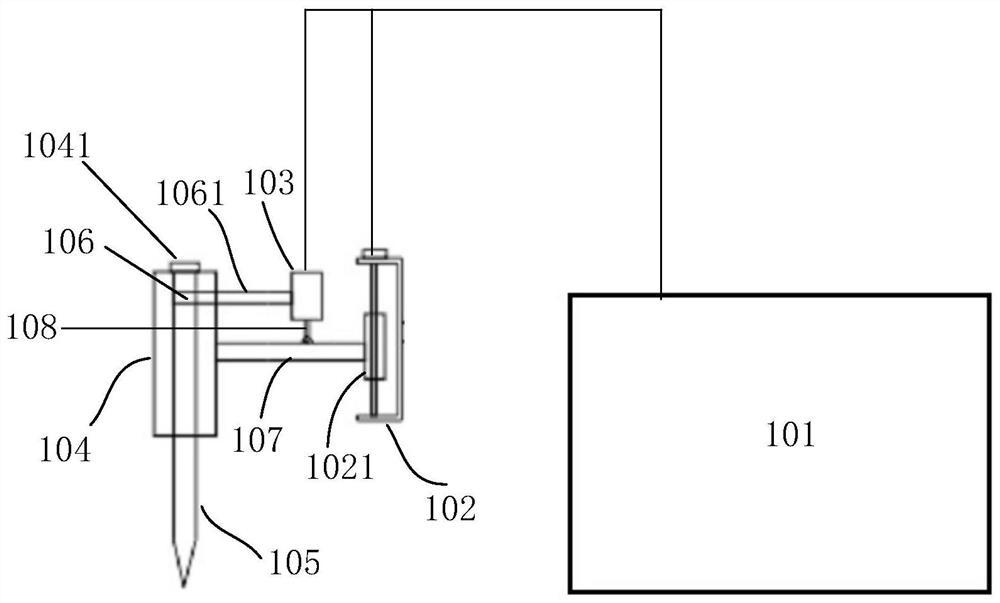
图1为本申请实施例提供的一种口腔手术辅助装置的机构示意图;
图2为本申请实施例提供的一种第一驱动装置的侧视图;
图3为本申请实施例提供的另一种第一驱动装置的结构示意图;
图4为本申请实施例提供的一种口腔手术机器人的结构示意图。
具体实施方式
下面结合本发明实施例附图进一步说明本发明实施例具体实现。
本申请提供了一种口腔手术机器人,如图1所示,图1为本申请实施例提供的一种口腔手术辅助装置的结构示意图,本申请提供的口腔手术辅助装置包括:控制系统101、第一驱动装置102、第二驱动装置103、钻针壳体104和传动结构106;
控制系统101分别与第一驱动装置102、第二驱动装置103电连接,第一驱动装置102上的滑动结构1021通过连接件107与钻针壳体104固定连接,钻针105可拆卸的插装在钻针壳体104内;
第二驱动装置103安装在连接件107上,第二驱动装置103通过传动结构106驱动钻针壳体104内插装的钻针105转动。
可替代地,在其他一实施例中,第二驱动装置(103)也可以安装在滑动结构1021上。或者,在其他再一实施例中,第二驱动装置(103)也可以安装在连接件107和滑动结构1021上。
在本实施例的一种实现方式中,控制系统101比如为控制主机,其分别与第一驱动装置102、第二驱动装置103连接,以控制第一驱动装置102和第二驱动装置103的工作状态。具体的,第一驱动装置102上的滑动结构1021通过连接件107与钻针壳体104固定,从而使得控制系统101通过控制第一驱动装置102工作,进而控制滑动结构1021进行移动,同时该滑动结构1021通过连接件107带动钻针壳体104进行相同的移动,以带动插装在钻针壳体104内的钻针105移动到朝准手术靶点的位置进行手术。
在本实施例的上述实现场景中,由于第二驱动装置103安装在连接件107上,从而使得第二驱动装置103的位置与钻针壳体104的位置相对固定,当第一驱动装置102上的滑动结构1021受控制系统101控制进行滑动时,第二驱动装置103跟随该滑动结构1021进行相同的位移,以当插装在钻针壳体104内的钻针105移动到朝准手术靶点的位置后,控制系统101控制第二驱动装置103工作,第二驱动装置103能够较为稳定的通过传动结构106驱动钻针105在该手术靶点的位置转动,以进行如钻孔等手术操作。
可选地,在本实施例的一种实现方式中,钻针105被第二驱动装置103驱动工作时的移动轨迹与滑动结构1021的移动轨迹平行。比如,在本实施例中,为了保证对钻针105的控制精度,理想的工作状态下,在控制系统101控制滑动结构1021移动时,若钻针壳体104带动钻针105在进行手术的有效路径上移动的距离和方向与滑动结构1021移动的距离和方向相同,即可实现通过控制系统101控制第一驱动装置102上的滑动结构1021滑动,进而实现对钻针105的精准控制。在本实施例中,为了保证这种精准控制,此时只需将钻针105设置成被第二驱动装置103驱动工作时的移动轨迹与滑动结构1021的移动轨迹保持平行的状态,即钻针105的钻头朝向与第一驱动装置102上滑动结构1021的滑动轨迹平行,就能较为高质量的实现上述理想状态下的精准控制。
可选地,在本实施例的一种实现方式中,钻针壳体104为圆柱形,钻针105安装在钻针壳体104中心,且钻针105的钻头朝向与钻针壳体104对准手术靶点的开口朝向平行。在本实施例的上述实现方式中,将钻针壳体104设计为圆柱形结构,以减少该钻针壳体104外面表上的棱角,从而减少该口腔手术辅助装置工作时与人体组织发生接触时造成的意外损伤。通过将钻针105安装在该钻针壳体104的中心,且与钻针壳体104的开口朝向平行,以更加准确通过移动钻针壳体104带动钻针105进行移动实现与口腔手术靶位的位置贴合。
可选地,在本实施例的一种实现方式中,连接件107与钻针壳体104垂直接连。
在本实施例的一种实现场景中,由于钻针105插装在钻针壳体104中,在通过控制钻针105工作进行如钻孔的手术过程时,为了保证钻针105在被第二驱动装置103驱动工作状态下其与患者手术靶点的接触位置呈现较好,以有利于手术的接触角度,此时将连接件107与钻针壳体104垂直连接,从而保证钻针105与手术靶点位置保持垂直,便于控制钻针105在该靶点位置进行如钻孔等口腔手术。
可选地,在本实施例的一种实现方式中,连接件107为直杆或弧形杆。
在本实施例的一种实现场景中,直杆或弧形杆的制作工艺简单,成本低,且能够以简单方便的通过连接件107将滑动结构1021与钻针壳体104或第二驱动装置103进行固定连接,以保证钻针壳体104与第二驱动装置103在跟随滑动结构1021移动时,钻针壳体104与第二驱动装置103的位置相对固定,使第二驱动装置103能够稳定的实现对插装在钻针壳体104中的钻针105进行驱动。
可选地,在本实施例的一种实现方式中,如图1所示,第二驱动装置103通过固定杆108可拆卸的安装在连接件107上。
在本实施例的上述实现方式中,通过固定杆108将第二驱动装置103可拆卸的安装在连接件107上,以便于对第二驱动装置103进行拆卸维修或更换。
可选地,在本实施例的一种实现方式中,传动结构106包括传动轴1061和齿轮组(附图中未示出);
第二驱动装置103的驱动轴与传动轴1061连接,传动轴1061与齿轮组连接,齿轮组与钻针105连接,以使得第二驱动装置103工作时,通过该传动轴1061和齿轮组以较为简单和易于实现的方式实现对钻针105的驱动。
在本实施例的上述实现方式中,通过将传动结构106设置为包括传动轴1061和齿轮组的方式,使得传动结构106的结构和使用更加的简单和易于实现的同时,也便于当第二驱动装置103或传动结构106中任意一个部件发生故障时对其进行拆卸、维修或更换,有效的降低了装置设备的整体成本,延长口腔手术辅助装置的使用寿命。
可选地,在本实施例的一种实现方式中,钻针壳体104的顶部还设置有用于拆装钻针105的锁紧开关1041,以使得钻针105能够稳定的插装于钻针壳体104内部,并方便的对其进行拆卸更换。
可选地,在本实施例的一种实现方式中,如图2所示,图2为本申请实施例提供的一种第一驱动装置的侧视图,第一驱动装置包括第一驱动电机112和丝杆122;滑动结构1021安装在丝杆122上,丝杆122与第一驱动电机112连接,以使第一驱动电机112通过驱动丝杆122转动,带动滑动结构1021移动。
在本实施的上述实现方式中,将滑动结构1021通过丝杆122与第一驱动电机112连接方式,以通过第一驱动电机112驱动丝杆122移动,进而带动与丝杆122连接的滑动结构1021朝着远离或靠近第一驱动电机112的方向移动,结构简单,成本低,且驱动方式易于控制,精确度高。
可选地,在本实施例一种实现方式中,如图2所示,第一驱动装置102还可以包括基座132,滑动结构1021设置在基座132上。
在本实施例的上述实现方式中,在第一驱动装置中设置基座132,将滑动结构1021设在该基座132上,使得滑动结构1021在受控滑动时,能够沿着该基座132进行滑动,从而进一步提高对滑动架构1021进行滑动控制的准确性。
可选地,在本实施例的一种实现方式中,如图3所示,图3为本申请实施例提供一种滑动结构的结构示意图,其中,滑动结构包括滑块1121、直线导轨1221和支撑座1321;
其中,支撑座1321固定设置在基座132上,直线导轨1221与支撑座1321固定连接,直线导轨1221贯穿滑块1121,滑块1121内设有螺纹,丝杆122旋拧入螺纹中,通过第一驱动电机112驱动丝杆122转动,从而带动滑块1121滑动。
在本实施例的上述实现方式中,如图2所示,将滑动结构设置为包括滑块1121、直线导轨1221、支撑座1321的方式,丝杆旋拧入滑块内的螺纹中,第一驱动电机112的驱动轴带动丝杆转动,从而带动滑块沿着丝杆方向移动。直线导轨1221与丝杆平行,滑块1121被第一驱动电机112驱动进行滑动时,能够沿着直线导轨1221上进行较为平稳的滑行,滑行受控精度更好,结构简单,且实现成本低。
在本实施例的一种实现方式中,如图3所示,优选的,直线导轨1221的数量为两个,该两条直线导轨1121分别架设在丝杆122的两侧位置,且与滑块1121滑动连接,设置两条直线导轨1121能够更好的保证滑块1121的滑动时的移动轨迹是沿着靠近或远离第一驱动电机112的直线所在方向上进行运动,从而更好的保证对滑块1121移动过程的方向进行控制的精准度。
可选地,在本实施的一种实现方式中,支撑座1321包括前支撑座13211和后支撑座13212,其中:
前支撑座13211固定设置于基座132上靠近第一驱动电机112的位置;
后支撑座13212固定设置于基座132上远离第一驱动电机112的位置;
直线导轨1221安装在前支撑座13211和后支撑座13212之间,且与前支撑座13211、后支撑座13212垂直。
在本实施例的上述实现方式中,将支撑座1321设置为包括将前支撑座13211和后支撑座13212,且分别与基座132固定,将直线导轨1221架设在前13211、后支撑座13212之间,使得在第一驱动电机112驱动丝杆122带动滑块1121移动时,滑块1121能够较好的沿着直线导轨1221朝着远离或靠近第一驱动电机112的直线运动,并一直处前支撑座13211和后支撑座13212之间,以限制该滑块1121的滑动位置,保证滑块1121滑动过程的稳定性。
可选地,在本实施例的一种实现场景中,第二驱动装置103一般为尺寸小于预设尺寸的小型驱动电机,通过设置小于预设尺寸的小型驱动电机,在保证该小型驱动电机能够驱动钻针105进行工作的同时,降低连接在滑块1121上的整体重量,从而进一步提高本实施例的口腔手术机辅助装置进行手术的稳定性,并降低控制该装置的工作能耗。
可选地,在本实施例的一种实现场景中,钻针壳体104的高度小于或等于第一阈值,宽度小于或等于第二阈值。其中,第一阈值和第二阈值根据口腔张开的尺寸设置的。
在口腔手术机器人使用过程中,需要患者持续长时间保持嘴巴较大程度张开的姿势,容易给患者带来额外的疲劳和痛苦。在本实施例中,可以对患者口腔张开的尺寸进行大数据统计分析,确定患者口腔张开的舒适尺寸阈值,如口腔张开时的高度舒适阈值,将其确定为第一阈值,以及异物伸入口腔的深度舒适阈值,并将其确定为第二阈值,根据该第一阈值和第二阈值,结合钻针105正常工作及钻孔的尺寸需求,设置相应尺寸的钻针壳体104和钻针105,例如将钻针壳体104的高度设置为小于或等于第一阈值,宽度设置为小于或等于第二阈值,以便保证钻针壳体104携带钻针105能够伸入患者的口腔内与手术靶位接触以进行手术的同时,又能够降低手术过程中患者维持嘴巴张开姿态引起的疲劳度,从而减少手术过程为患者带来的痛苦。
可选地,在本实施例的一种实现方式中,第一驱动装置中滑动结构外侧还可以设置保护套(附图中未示出),该保护套的下端与基座卡接,当保护套的下端与基座卡接时,滑动结构容纳于保护套与基座卡接所形成的空腔中。保护套的上侧设置有开槽,以使连接件能够沿着开槽的长边移动。通过设置保护套,能够保护第一驱动装置与外部物体发生碰撞产生的损坏,提高第一驱动装置的使用寿命,同时卡接的方式也能够保证该保护套易于拆卸,以便于对第一驱动装置中包含的如第一驱动电机或丝杆等进行维修。
本实施例提供的口腔手术辅助装置,包括:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;控制系统分别与第一驱动装置、第二驱动电连接,第一驱动装置上的滑动结构通过连接件与钻针壳体固定连接;钻针插装在钻针壳体内;第二驱动装置通过传动结构驱动钻针壳体内的钻针转动,第二驱动装置安装在连接件和/或滑动结构上。本申请实施例提供的口腔手术辅助装置,通过控制系统控制第一驱动装置上的滑动结构带动插装在钻针壳体内的钻针朝准口腔手术靶位,当控制系统控制第二驱动装置工作时,第二驱动装置通过传动结构驱动钻针转动,以在患者的口腔手术靶位完成钻孔等手术,这种口腔手术辅助装置的结构简单,控制精度高,易于操控,使用方便,制造成本低,便于行业推广使用。
实施例二
基于本申请实施例一的口腔手术辅助装置,本申请实施例二还提供一种口腔手术机器人,如图4所示,图4为本申请实施例提供的一种口腔手术机器人的结构示意图,该口腔手术机器人包括如本申请实施例一的任意一种口腔手术辅助装置201,还包括机械臂202。
第一驱动装置102固定安装在机械臂202的末端,机械臂202与控制系统101电连接。
在本实施例的中,为了便于口腔手术的进行,本申请实施例提供一种包含机械臂202和口腔手术辅助装置201的口腔手术机器人,使得操控者可以通过控制该口腔手术机器人,对该机械臂202的姿态进行调整,以使得连接在机械臂202末端的口腔手术辅助装置201的钻针与患者口腔的手术靶位保持较好的手术接触角度,以利于口腔手术的进行,保证手术的效果。例如当患者平躺下时,通过调整机械臂202的姿态,从而将口腔手术辅助装置201的钻针的钻头朝向与该患的口腔手术靶位接触点保持垂直的角度,以便于通过该钻针进行如钻孔等口腔手术。
可选地,在本实施例的一种实现场景中,机械臂202比如为包含多个自由度的机械臂,通过将该机械臂202设置为包含多个自由度的机械臂,能够有效的提高本实施例中控制系统101对机械臂202进行控制的灵活性,是更好的适应不同的手术场景。优选的,所述机械臂202为为6个自由度的机械臂,使用包含6自由度机械臂的口腔手术机器人,能够在节省成本的同时,方便高精度的实现手术过程所需的多姿态控制。
可选地,在本实施例的一种实现方式中,口腔手术机器人还可以包括操控组件203,操控组件203与控制系统101电连接,操控组件203用于生成对机械臂202和/或口腔手术辅助装置201的控制指令。
在本实施例中,为了实现对机械臂202和/或口腔手辅助装置201的灵活操作,可以设置操控组件203。本实施例此处列举一种操控组件203的实现方式:例如包含操作机械臂202进行姿态调整的姿态控制按键、包括用于控制口腔手术辅助装置201的第一驱动组件或第二驱动组件工作的驱动控制按键,以更加灵活和方便通过该操控组件203进行手术操控控制,当然,本实施例此处只是示例性的对操控组件203进行说明,并不代表本申请局限于此。
可选地,在本实施例的一种实现方式中,如图4所示,口腔手术机器人还可以包括箱体204;
控制系统101固定设置在箱体204的内部,机械臂202的前端与箱体204的顶端固定连接,操控组件203可拆卸的安装在箱体204的侧壁上。
在本实施的一种实现方式中,将控制系统101固定设置在口腔手术机器人的箱体204的内部,将机械臂202的前端与该箱体204的顶端固定连接,从而可以有效的对控制系统等核心零部件进行结构保护,以避免发生碰撞损坏,同时也方便通过移动箱体204实现对机械臂202、口腔手术辅助装置201等进行整体移动。
在本实施例的一种实现方式中,口腔手术机器人还包括安放盒205,安放盒205设置于箱体204的外侧,操控组件203在不使用时可以收纳于安放盒205中。
在本实施例的上述实现方式中,将操控组件203设置于箱体204外侧,能够便于操控者如医生通过双手在合适的位置对该操控组件203进行操作。同时,在箱体204的外侧设置安放盒205,以便于在不使用该口腔手术机器人进行手术时,将操控组件203收纳于安放盒205中,避免操控组件203发生丢失或损坏的情况发生。
可选地,在本申请的一种实施例中,如图4所示,口腔手术机器人还包括支撑架206,该支撑架206设置于箱体204的下方,支撑架206上设置有可调节的旋转开关(附图中未示出),该旋转开关用于调节箱体204距离地面之间的高度以及箱体204的水平姿态。
在本实施中,通过在箱体204的下方设置支撑架206,并通过旋转开关调节该支撑架206支撑的箱体204距离地面的高度,以及箱体204的水平姿态,以适应将口腔手术机器人置于不同的工作平台工作需求。同时,通过该支撑架206还能够调节口腔手术机器人与手术场所的工作平台之间的静摩擦力,提高手术过程中口腔手术机器人放置在平台上的稳定性。
可选地,如图4所示,箱体204的底面还连接有万向轮207,优选的,万向轮207的数量为4个,以便于通过4个万向轮207对箱体口腔手术机器人进行整体移动。
其中,可选地,每个万向轮207上还设置有锁死结构(附图中未示出),该锁死结构用于对万向轮207进行锁死,以避免口腔手术机器人使用过程中产生位移影响手术治疗的精度。
本申请提供一种口腔手术机器人,包括:本申请实施例一所述的任意一种口腔手术辅助装置,还包括:机械臂;其中,第一驱动装置固定安装在机械臂末端,以使口腔手术辅助装置与机械臂连接,控制系统与机械臂的前端电连接,以通过控制系统对机械臂进行控制。本申请提供的口腔手术机器人通过控制系统控制机械臂和连接在机械臂末端的口腔手术辅助装置进行姿态调节、位置微调和手术钻孔等操作,结构简单,使用方便,成本低,易于维护。
在各种实施例中,由参照附图的描述。然而,某些实施例可以在不使用一个或多个这些特定的细节,或结合其它已知的方法和结构。在以下描述中,阐述了很多具体的细节,例如具体的结构,尺寸和工艺等,以提供对本申请的全面理解本申请。在其它实例中,公知的半导体加工工艺和制造技术没有特别详细地描述,以避免模糊本申请中。遍及本说明书“一个实施例”是指特定特征,结构,配置中,或该实施例中所描述的特征被包括在本申请的至少一个实施例中。因此,出现的短语“在一个实施方案中”在本说明书中不同地方本申请不一定指相同的实施例。此外,具体的特征,结构,配置,或特性可以以任何合适的方式组合在一个或多个实施例中。
在本公开中,表述“A或B”、“A或/和B中的至少一个”或者“A或/和B的一个或多个”可包括所列项目所有可能的组合。例如,表述“A或B”、“A和B中的至少一个”或者“A或B中的至少一个”可包括:(1)至少一个A,(2)至少一个B,或者(3)至少一个A和至少一个B。
在本公开的各种实施方式中所使用的表述“第一”、“第二”、“所述第一”或“所述第二”可修饰各种部件而与顺序和/或重要性无关,但是这些表述不限制相应部件。以上表述仅用于将元件与其它元件区分开的目的。例如,第一用户设备和第二用户设备表示不同的用户设备,虽然两者均是用户设备。例如,在不背离本公开的范围的前提下,第一元件可称作第二元件,类似地,第二元件可称作第一元件。
当一个元件(例如,第一元件)称为与另一元件(例如,第二元件)“(可操作地或可通信地)联接”或“(可操作地或可通信地)联接至”另一元件(例如,第二元件)或“连接至”另一元件(例如,第二元件)时,应理解为该一个元件直接连接至该另一元件或者该一个元件经由又一个元件(例如,第三元件)间接连接至该另一个元件。相反,可理解,当元件(例如,第一元件)称为“直接连接”或“直接联接”至另一元件(第二元件)时,则没有元件(例如,第三元件)插入在这两者之间。
以上所述仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
- 上一篇:一种医用注射器针头装配设备
- 下一篇:一种新型小鼠原位胸膜间皮瘤模型及其建立方法