用于抑制水光互补系统超低频振荡的方法
阅读说明:本技术 用于抑制水光互补系统超低频振荡的方法 (Method for inhibiting ultralow frequency oscillation of water-light complementary system ) 是由 吴翔宇 许寅 和敬涵 王佳璇 王思家 陈刚 丁理杰 魏巍 于 2021-07-19 设计创作,主要内容包括:本发明提供了一种用于抑制水光互补系统超低频振荡的方法,包括:将校正控制器串联至水光互补系统中的水轮机调速系统,作为水轮机调速系统的输入;采集所述水轮机调速系统的实际角频率和参考角频率,并计算实际角频率和参考角频率的差值;分析水轮机调速系统开环传递函数,根据传递函数结果构建参数优化模型;根据参数优化模型对所述校正控制器的参数进行优化;将差值输入至优化后的校正控制器,得到的输出进而输入至水轮机调速系统抑制水光互补系统的超低频振荡。可以在不牺牲水电机组一次调频性能的前提下抑制超低频振荡。(The invention provides a method for inhibiting ultralow frequency oscillation of a water-light complementary system, which comprises the following steps: the correction controller is connected in series to a water turbine speed regulating system in the water-light complementary system to be used as the input of the water turbine speed regulating system; acquiring the actual angular frequency and the reference angular frequency of the water turbine speed regulating system, and calculating the difference value of the actual angular frequency and the reference angular frequency; analyzing an open-loop transfer function of the hydraulic turbine speed regulating system, and constructing a parameter optimization model according to a transfer function result; optimizing the parameters of the correction controller according to a parameter optimization model; and inputting the difference value into the optimized correction controller, and further inputting the obtained output into a water turbine speed regulating system to inhibit the ultralow frequency oscillation of the water-light complementary system. The ultra-low frequency oscillation can be inhibited on the premise of not sacrificing the primary frequency modulation performance of the hydroelectric generating set.)
技术领域
本发明涉及电力系统稳定控制技术领域,尤其涉及一种用于抑制水光互补系统超低频振荡的方法。
背景技术
我国的水能资源十分丰富,水电装机容量世界第一,其中小水电机组约占23.5%。水力发电具有灵活启动、快速调节的特点,在小水电流域内安装分布式光伏发电,形成分布式光伏与小水电互补发电系统(简称水光互补系统),可利用水电的灵活调节特性平抑光伏的出力波动,对提升光伏消纳能力、增强系统总体可调度能力、实现多时间尺度多能互补具有重要意义。
然而,在高比例水电系统中,由于水电机组的“水锤效应”和调速器的参数设置不合理,水电机组将会向系统提供负阻尼,从而引发超低频振荡。超低频振荡是指振荡频率低于0.1Hz的一种频率振荡现象,区别于传统的低频振荡,此现象是全网频率的同步振荡。2016年4月,在南方电网和云南电网异步联网的实验中,发生了长达半个小时的严重超低频振荡事故,在解除水轮机的一次调频功能后,振荡逐渐消失。超低频振荡是制约水光互补系统水电与光伏消纳和送出的重要因素。
已有研究表明,超低频振荡与水电机组的一次调频过程强相关,因此超低频振荡的抑制措施大多采用优化水轮机调速器控制参数的方法。然而,超低频振荡抑制与一次调频对调速器控制参数的要求存在矛盾,为了抑制超低频振荡将牺牲一次调频性能,导致频率调节速度可能无法满足要求。
因此,亟待研究兼顾超低频振荡抑制和一次调频性能的水电侧超低频振荡抑制控制方法。
发明内容
本发明提供了一种用于抑制水光互补系统超低频振荡的方法,以解决现有技术中存在的缺陷。
为了实现上述目的,本发明采取了如下技术方案。
一种用于抑制水光互补系统超低频振荡的方法,包括:
将校正控制器串联至水光互补系统中的水轮机调速系统,作为水轮机调速系统的输入;
采集所述水轮机调速系统的实际角频率和参考角频率,并计算实际角频率和参考角频率的差值;
分析水轮机调速系统开环传递函数,根据传递函数结果构建参数优化模型;
根据所述参数优化模型对所述校正控制器的参数进行优化;
将所述差值输入至优化后的校正控制器,得到的输出进而输入至水轮机调速系统抑制水光互补系统的超低频振荡。
优选地,分析水轮机调速系统开环传递函数,包括根据阻尼转矩法分析水轮机调速系统开环传递函数,得到机械功率变化量,进而得到阻尼转矩系数。
优选地,构建参数优化模型如下式(1)所示:
其中,T1、T2、T3、T4为时间参数,Kcmin,Kcmax,Timin,Timax(i=1,2,3,4)为相应参数的上下限,DT(f)为调速系统传递函数G(s)在关注频率范围内的阻尼转矩系数代数之和。
优选地,所述校正控制器的串联校正环节的表达式如下式(2)所示:
其中,T1、T2、T3、T4为时间常数,Kc为比例系数,各超前校正系数在整定时,一般需要满足T1>T2>0,T3>T4>0,Kc>0。
优选地,根据所述参数优化模型对所述校正控制器的参数进行优化,包括:利用粒子群优化算法进行求解参数优化模型获得校正控制器的优化参数。
优选地,根据阻尼转矩法分析水轮机调速系统开环传递函数,得到机械功率变化量,进而得到阻尼转矩系数,具体包括:
建立如下式(3)的水轮机调速系统开环传递函数:
利用阻尼转矩法对水轮调速系统进行分析,得到如下式(4)所示的系统振荡角频率为ωs时机械功率变化量,进而得到阻尼转矩系数DT:
其中,ΔPm是机械功率的原动机调速器机械功率的变量,Ggov是调速器的传递函数,Ggh是水轮机的传递函数,Δω是转速偏差量,TW为水轮机的水锤系数,KP、KI、KD分别是比例、积分、微分系数,bp是调差系数;TG是伺服系统的时间常数,ωs是系统振荡角频率,DT是阻尼转矩系数,ST是同步转矩系数。
由上述本发明的用于抑制水光互补系统超低频振荡的方法提供的技术方案可以看出,本发明通过对每个水电机组调速环节串联一个超前的校正控制器,补偿调速器和水轮机滞后的相位,提供正的阻尼转矩,可以在不牺牲水电机组一次调频性能的前提下抑制超低频振荡。
本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
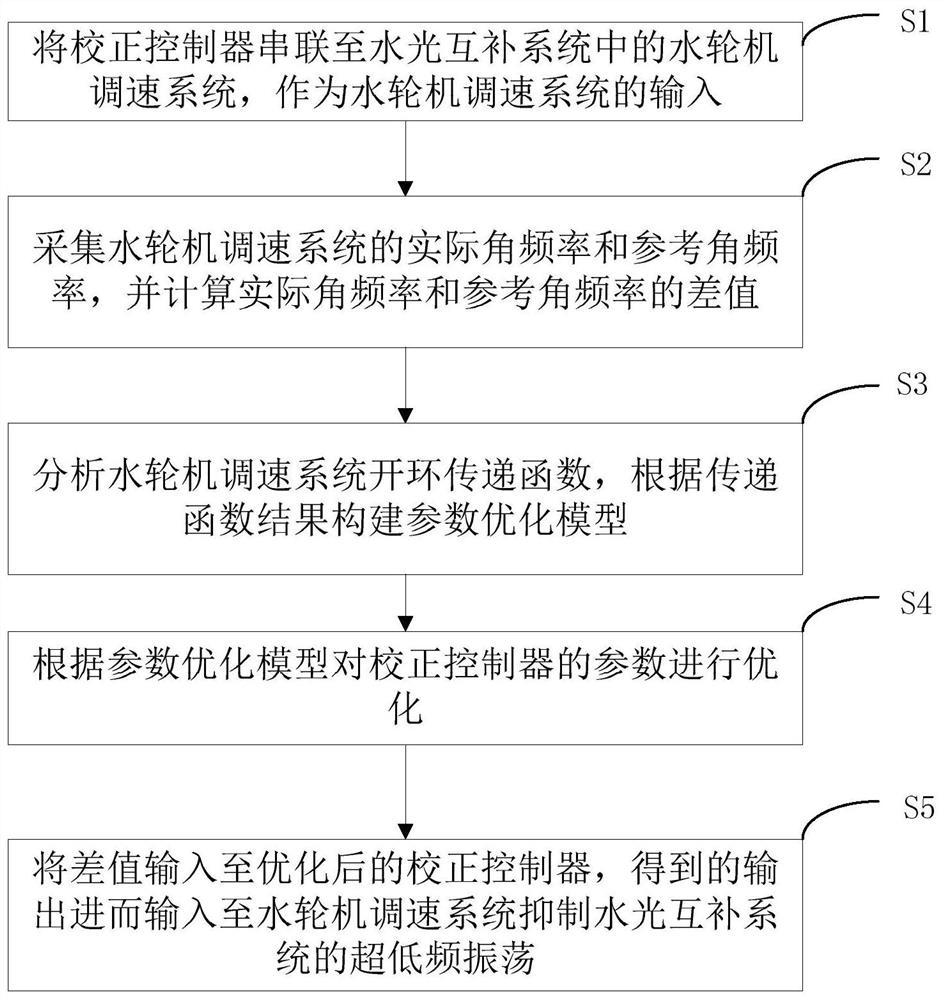
图1为实施例的用于抑制水光互补系统超低频振荡的方法流程示意图;
图2为实施例提供的加入串联控制器后水轮机调速器的控制框图;
图3为实施例提供的有/无串联校正时阻尼转矩系数的对比图;
图4为实施例提供的水电机组调速器的控制框图;
图5为实施例提供的阻尼转矩矢量图;
图6为实施例提供的优化控制器参数的粒子群优化算法流程示意图;
图7为实施例提供的基于串联校正控制器的水光互补系统示意图;
图8为实施例提供的不同控制方法下系统频率的振荡曲线图。
具体实施方式
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
为便于对本发明实施例的理解,下面将结合附图以几个具体实施例为例做进一步的解释说明,且各个实施例并不构成对本发明实施例的限定。
实施例
图1为本实施例提供的用于抑制水光互补系统超低频振荡的方法流程示意图,参照图1,包括如下步骤:
S1将校正控制器串联至水光互补系统中的水轮机调速系统,作为水轮机调速系统的输入。串联控制器后水轮机调速器的控制框图如图2所示。
校正控制器的串联校正环节的表达式如下式(2)所示:
其中,T1、T2、T3、T4为时间常数,Kc为比例系数,各超前校正系数在整定时,一般需要满足T1>T2>0,T3>T4>0,Kc>0。
加入串联校正前后单机系统阻尼转矩系数的对比图如图3所示,可以看出对于无串联校正控制器的水电机组,在超低频段的负阻尼非常大,容易发生超低频振荡;当加入串联校正控制器后,系统在超低频频段的阻尼转矩系数有明显改善。
此串联校正环节为超前校正,产生超前的相位,使阻尼转矩系数由负变正,为系统提供正阻尼,可有效抑制超低频振荡。
S2采集水轮机调速系统的实际角频率和参考角频率,并计算实际角频率和参考角频率的差值。
S3分析水轮机调速系统开环传递函数,根据传递函数结果构建参数优化模型。
根据阻尼转矩法分析水轮机调速系统开环传递函数,得到机械功率变化量,进而得到阻尼转矩系数。
水轮机调速系统的控制框图如图4所示,具体包括:
建立如下式(3)的水轮机调速系统开环传递函数:
利用阻尼转矩法对水轮调速系统进行分析,得到如下式(4)所示的系统振荡角频率为ωs时机械功率变化量,进而得到阻尼转矩系数DT:
其中,ΔPm是机械功率的原动机调速器机械功率的变量,Ggov是调速器的传递函数,Ggh是水轮机的传递函数,Δω是转速偏差量,TW为水轮机的水锤系数,KP、KI、KD分别是比例、积分、微分系数,bp是调差系数;TG是伺服系统的时间常数,ωs是系统振荡角频率,DT是阻尼转矩系数,ST是同步转矩系数。阻尼转矩系数和同步转矩系数之间位置关系如图5所示,当阻尼转矩DT<0时,Ggov(s)和Gh(s)都是滞后环节,-ΔPm的相位滞后于Δω,水轮机调速系统整体提供负阻尼,导致超低频振荡的发生,负阻尼转矩系数是主要影响因素。
构建反映调速侧开环模型在超低频段的阻尼水平指标函数:
求解时频率上限可取为0.1Hz,下限可取为0.01Hz。
进而构建参数优化模型如下式(1)所示:
其中,T1、T2、T3、T4为时间参数,Kcmin,Kcmax,Timin,Timax(i=1,2,3,4)为相应参数的上下限,DT(f)为调速系统传递函数G(s)在关注频率范围内的阻尼转矩系数代数之和。
S4根据参数优化模型对所述校正控制器的参数进行优化;
利用粒子群优化算法进行求解参数优化模型获得校正控制器的优化参数。具体可得到单台水电机组的最优串联校正控制参数。粒子群优化算法求解流程如图6示。首先生成一个速度和位置随机的粒子种群,每个粒子从自身的起始位置开始,在有限的空间内进行搜索;以阻尼水平指标函数J作为对粒子位置的评价函数,然后通过每个粒子的移动和整个种群最优值的更新来实现对最优解的寻找。
S5将所述差值输入至优化后的校正控制器,得到的输出进而输入至水轮机调速系统抑制水光互补系统的超低频振荡。
本实施例还提供了一个含有5台水电机组和2台光伏机组的水光互补系统作为算例,对本发实施例方法的有效性进行验证,基于串联校正控制器的水光互补系统示意图如图7所示,本验证有效性的结果来自于商业仿真软件(Power Systems Computer AidedDesign,PSCAD)。
水电总容量为380MW,光伏总容量为20MW。系统中负荷模型采用恒阻抗模型,本地负荷为60MW+10MVar。各个水电、光伏电站的装机情况如下表1所示。XNH和MX两个光伏电站的出力分别为10MW和5MW,水电机组采用PID型调速器,相关参数设计参考实际数据,具体参数如表下2所示。将串联校正控制器加入互补系统的水电机组中,使用PSO算法进行参数优化整定,整定后的水单机组串联校正控制器参数如下表3所示。
表1
表2
表3
系统仿真时间设置为50s,在0s时投入30MW的负荷作为扰动,不同控制方法下系统频率的振荡曲线如图8,由图8可知,未使用串联校正控制时,系统超调量为0.7%,超低频振荡剧烈,若偏差值小于0.1%认为系统进入稳态,则系统调节时间为38.948s,振荡衰减缓慢。使用串联校正控制后,超调量仅为0.12%,调节时间为18.716s,超低频振荡迅速平息,且频率快速趋于平稳,说明本文所提串联校正控制方法能够兼顾超低频振荡抑制和频率调节响应速度。
综上所述,本实施例为水光互补超低频振荡抑制提供了新的方法。根据阻尼转矩法分析水轮机调速系统开环传递函数,获取影响水光互补系统超低频振荡的影响因素;分析了加入串联校正控制器抑制超低频振荡的原理;构建优化模型设置串联校正控制器的参数,增加了系统阻尼,抑制超低频振荡。在5水电2光伏的水光互补系统中验证了本文设计的串联校正控制器抑制超低频振荡的有效性。
本领域技术人员应能理解上述的应用类型仅为举例,其他现有的或今后可能出现的应用类型如可适用于本发明实施例,也应包含在本发明保护范围以内,并在此以引用方式包含于此。
在实际应用中,上述信号处理装置也可以设置在电子式互感器的内部的其它位置。本发明实施例并不局限上述信号处理装置的具体放置位置,上述信号处理装置在电子式互感器的内部中的任何放置方式都在本发明实施例的保护范围中。
本领域技术人员应能理解,图1仅为简明起见而示出的各类网络元素的数量可能小于一个实际网络中的数量,但这种省略无疑是以不会影响对发明实施例进行清楚、充分的公开为前提的。
通过以上的实施方式的描述可知,本领域的技术人员可以清楚地了解到本发明可借助软件加必需的通用硬件平台的方式来实现。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。